The Third "Unmanned Vanguard" Intelligent Swarm System Challenge
Challange Overview:
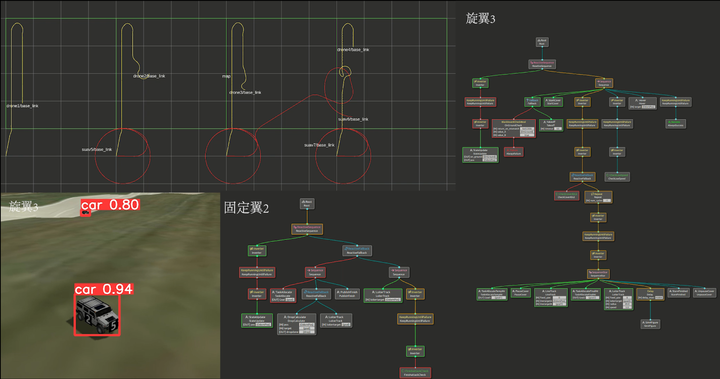
Each team sends 3 to 5 rotary-wing drones into the competition area to search for targets. The rotary-wing drones can fly over the competition area in formation and in any direction. After obtaining the position of the target, they issue attack instructions to the fixed-wing drones waiting in the air, and the fixed-wing drones throw simulated ammunition at the target to attack. The more accurate the target position is, the more accurate the target is, and the shorter the time to complete the task, the higher the score of the participating team.
In order to achieve the tasks described above, a distributed quadrotor-fixed-wing Intelligent Collaborative System is developed with motion planning module, collaborative decision module, object detection module. We demostrate the developed system in the simulation. Finally, the developed algorithm is deployed in the real platforms.
Qingzhao Liu
Phd
My research interests include Motion Planning for Multi-UAVs, Formation Contronl and autonomous driving with learning-based method like VLA model.