Coaxial Drone Formation Maintenance and Formation Transformation
Project Overview:
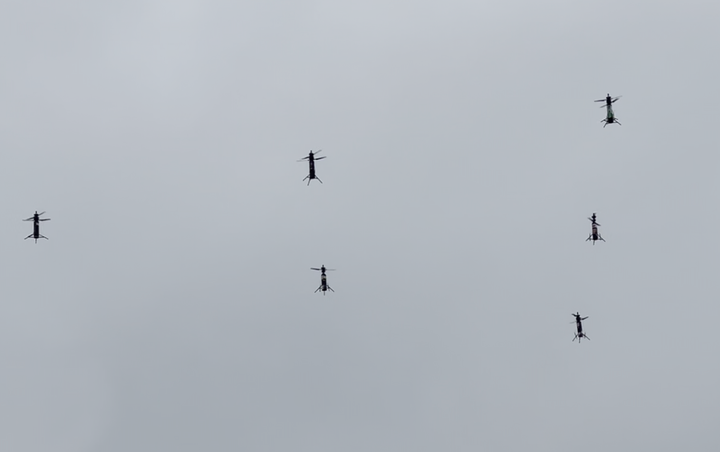
With the goal of achieving fully autonomous formation flight with six coaxial drones in high-altitude environment, a decentralized formation trajectory planning framework is developed to enable autonomous flight with only onboard computation resource.
Qingzhao Liu
Phd
My research interests include Motion Planning for Multi-UAVs, Formation Contronl and autonomous driving with learning-based method like VLA model.