A Gradient-free and Parallel Hierarchical Motion Planning Framework for Quadrotor Swarm
 Simulation Results
Simulation ResultsAbstract
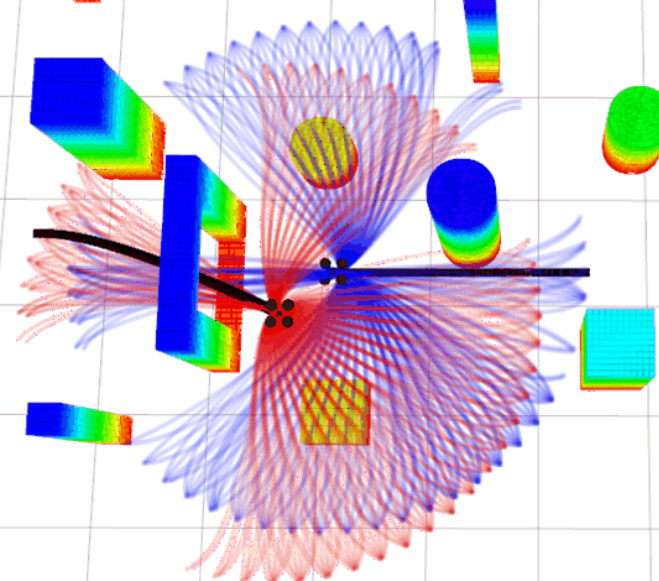
Quadrotor swarm with advanced coordination capabilities has garnered widespread attention, yet efficient and reliable motion planning remains a challenge. This paper presents a hierarchical motion planning framework for quadrotor swarm autonomous navigation in unknown cluttered scenes. Specifically, we take a step forward sampling of multiple neighbors in the lattice graph and generate a group of paths. The infeasible paths are excluded and the one with the minimum cost is chosen from the remaining. Taking it as a guiding path, a gradient-free trajectory optimization method based on model predictive path integral (MPPI) is developed to produce the execution trajectory. Compared to gradient-descent approaches, it is capable of dealing with non-continuous and non-convex constraints. Additionally, the proposed method is deployed on GPUs in parallel to enhance efficiency. Extensive simulations demonstrate the robustness and effectiveness of the proposed motion planning framework.
Qingzhao Liu
Phd
My research interests include Motion Planning for Multi-UAVs, Formation Contronl and autonomous driving with learning-based method like VLA model.