Qingzhao Liu
Phd
The Hong Kong University of Science and Technology (Guangzhou)
About Me
I am Qingzhao Liu (刘清朝), a phd student at the Robotics and Autonomous Systems, The Hong Kong University of Science and Technology (Guangzhou), advised by Prof. Jun Ma.
My primary research interests include Motion Planning for Multi-UAVs, Formation Control and autonomous driving. If you have any academic problems or seeking any form of cooperation, please feel free to email me at qliu910@connect.hkust-gz.edu.cn 😃
Interests
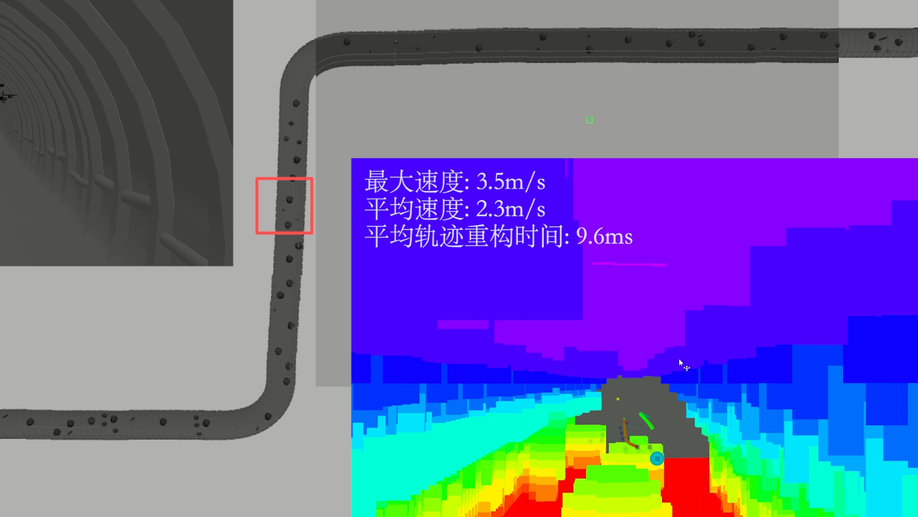
- Motion Planning For UAV
- Formation Control
- Autonomous driving
Education
Robotics and Autonomous Systems, 2025.09-Present
The Hong Kong University of Science and Technology (Guangzhou)
Control Engineering, 2022.09-2025.06
Tianjin University
Automation, 2018.09-2022.06
Tianjin University