Qingzhao Liu
Master
Tianjin University
About Me
I am Qingzhao Liu (刘清朝), a master student at the School of Electrical and Information Engineering, Tianjin University, advised by Prof. Bailing Tian.
My primary research interests include Motion Planning for Multi-UAVs, Formation Control and the application of Behavior tree in UAV system. If you have any academic problems or seeking any form of cooperation, please feel free to email me at qz_liu@tju.edu.cn 😃
I am looking for a Ph.D. position in the relative area.
Interests
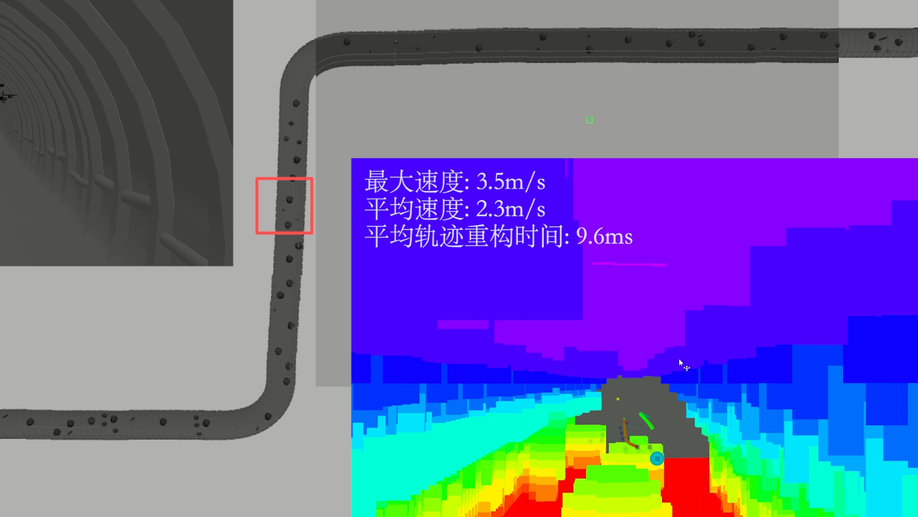
- Motion Planning For UAV
- Formation Control
- Behavior Tree
- Robots
Education
Studing in Control Engineering, 2022.09-present
Tianjin University
Automation, 2018.09-2022.06
Tianjin University